Eng
Eng
Программное обеспечение
Программы для платформенных инерциальных навигационных систем
Программы для разработки, исследования и отладки систем
Программа для решения задачи ориентации с расширенной полосой частот пропускания сигналов (код SO) Программа визуализации выходных сигналов датчиков в реальном масштабе времени Программное обеспечение для системы контроля состояний контактной сети железной дороги Комплектность поставки программ Комплекс программ LOTUS для исследования автомобильных навигационных систем на базе микромеханической инерциальной системы и спутниковой навигационной системы
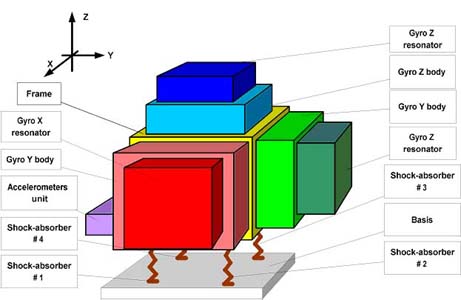
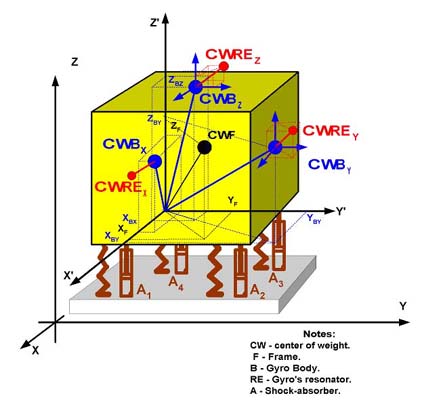
Программы для БИНС на базе лазерных, волоконно-оптических и динамически настраиваемых гироскопов Калибровка Калибровка инерциального измерительного блока (ИИБ) БИНС на точных немеханических гироскопах с использованием поворотного стола низкой точности (код SCLH) Программа предназначена для обработки показаний датчиков БИНС, накопленных в результате реализации методики высокоточной калибровки параметров ИИБ (дрейфов гироскопов, смещений нулей акселерометров, масштабных коэффициентов гироскопов и акселерометров, нелинейностей масштабных коэффициентов акселерометров, а также перекосов осей чувствительности датчиков). Для этого ИИБ поворачивается на углы кратные 90 град с погрешностью ±10 относительно вертикали и направления на Север на двухстепенном или трехстепенном поворотном столе. Программа предназначена для определения параметров ИИБ на точных немеханических гироскопах (например, лазерных). Калибровка ИИБ БИНС на точных механических гироскопах с использованием поворотного стола низкой точности (код SCMH) То же, что и в SCLH, за исключением того, что программа предназначена для определения параметров ИИБ на точных механических гироскопах (например, точных динамически настраиваемых). Калибровка ИИБ БИНС на грубых немеханических гироскопах с использованием поворотного стола низкой точности (код SCLL) Программа предназначена для обработки показаний датчиков БИНС, накопленных в результате реализации методики высокоточной калибровки параметров ИИБ (дрейфов гироскопов, смещений нулей акселерометров, масштабных коэффициентов гироскопов и акселерометров, а также перекосов осей чувствительности датчиков). Для этого ИИБ вначале поворачивается на углы кратные 450 с погрешностью ±10’ относительно вертикали, а затем на углы кратные 90 град с погрешностью ±10 относительно вертикали и направления на Север на двухстепенном или трехстепенном поворотном столе. Программа предназначена для определения параметров ИИБ на грубых немеханических гироскопах (например, волоконных). Калибровка ИИБ БИНС на грубых механических гироскопах с использованием поворотного стола низкой точности (код SCML) То же, что и в SCLL, за исключением того, что программа предназначена для определения параметров ИИБ на грубых механических гироскопах (например, грубых динамически-настраиваемых). Калибровка блока акселерометров на поворотном столе низкой точности (код SCA) Программа предназначена для обработки показаний акселерометров, накопленных в результате реализации методики высокоточной калибровки блока акселерометров (смещений нулей, масштабных коэффициентов и перекосов осей чувствительности). Для этого ИИБ поворачивается на углы кратные 450 с погрешностью ±10’ относительно вертикали на двухстепенном или трехстепенном поворотном столе. Выставка Выставка на неподвижном основании (код SAF) Программа реализует алгоритмы, предназначенные для определения ориентации ИИБ относительно направления на Север и местной вертикали на неподвижном основании, а также для калибровки части параметров ИИБ. Выставка на качающемся основании (код SAR) Программа реализует алгоритмы, предназначенные для определения ориентации ИИБ относительно направления на Север и местной вертикали на основании, которое совершает угловые и линейные колебания вокруг двух или трех осей, а также для калибровки части параметров ИИБ. Выставка на подвижном основании (код SAM) Программа реализует алгоритмы, предназначенные для определения ориентации ИИБ относительно направления на Север и местной вертикали при установке на основание, которое перемещается в пространстве, а также для калибровки части параметров ИИБ. Навигация Автономная навигация авиационной системы (код SNA) Программа реализует алгоритмы, предназначенные для автономного определения координат, скорости и ориентации. Автономная наземная навигация(код SNAL) Программа реализует алгоритмы, предназначенные для определения координат, скорости и ориентации наземного подвижного объекта с использованием для коррекции системы нулевой скорости на стоянках/остановках и информации одометра. Наземная навигация для интегрированной системы (код SNIL) Программа реализует алгоритмы, предназначенные для совместной обработки показаний датчиков БИНС и других источников информации (спутниковой навигационной системы, одометра, нулевой скорости на остановках объекта и т.п.). В результате этого значительно повышается точность определения выходных параметров (координаты, скорость, ориентация) за счет коррекции системы, а также уточнения начальной выставки ИИБ по курсу и вертикали и калибровки его параметров. Навигация для интегрированной авиационной системы (код SNIA) Программа реализует алгоритмы, предназначенные для совместной обработки показаний датчиков БИНС и других источников информации (спутниковая навигационная система, доплеровская система измерения скорости, высотомер и т.п.). В результате этого значительно повышается точность определения выходных параметров (координаты, скорость, ориентация) за счет коррекции системы, а также уточнения начальной выставки ИИБ по курсу и вертикали и калибровки его параметров. Моделирование Моделирование показаний датчиков БИНС в процессе калибровки (коды SMC-LH, SMC-MH, SMC-LL, SMC-ML) Программы серии SMC предназначены для отладки программ обработки показаний датчиков SCLH, SCMH, SCLL, SCML и их алгоритмов, а также для оценки точности калибровки параметров ИИБ методом Монте-Карло. Моделирование показаний датчиков БИНС в процессе выставки (коды SMA-F, SMA-R и SMA-M) Программы серии SMA предназначены для отладки программ выставки SAF, SAR и SAM и их алгоритмов, а также для оценки точности выставки системы методом Монте-Карло. Моделирование показаний датчиков системы в процессе движения (коды SMN-AL, SMN-AA, SMN-IL и SMN-IA) Программы серии SMN предназначены для отладки программ навигации SNAL, SNAA, SNIL, SNIA и их алгоритмов, а также для оценки точности определения выходных параметров системы методом Монте-Карло. Моделирование импульсов выходных сигналов лазерных гироскопов (код SMO) Программа предназначена для отладки программы SO, а также для оценки точности определения параметров ориентации алгоритмом программы SO. Программы для платформенных инерциальных навигационных систем Калибровка Калибровка на неподвижном основании (код PCF) Программа предназначена для обработки показаний датчиков системы, накопленных в результате реализации методики калибровки ее параметров (дрейфов гироскопов, смещений нулей акселерометров, масштабных коэффициентов акселерометров, перекосов осей чувствительности акселерометров, перекосов рамок карданова подвеса) на неподвижном основании (в лаборатории или на объекте) без использования поворотного стола и какой-либо внешней информации. Калибровка на подвижном основании (код PCM) Программа предназначена для обработки показаний датчиков системы, накопленных в результате реализации методики калибровки ее параметров (дрейфов гироскопов, смещений нулей акселерометров, масштабных коэффициентов акселерометров) на подвижном основании. Калибровка корпусного и курсового уходов платформы (код PCD) Программа предназначена для определения величины дрейфов горизонтальных гироскопов в зависимости от положения корпуса системы относительно направления на Север (курсовой уход) и от положения внутренней рамки относительно корпуса (корпусной дрейф) с целью их дальнейшей компенсации в процессе работы системы. Выставка Выставка на неподвижном основании (код PAF) Программа реализует алгоритмы, предназначенные для определения ориентации платформы относительно направления на Север и местной вертикали на неподвижном основании, а также для калибровки части параметров системы. Выставка на качающемся основании (код PAR) Программа реализует алгоритмы, предназначенные для определения ориентации платформы относительно направления на Север и местной вертикали на основании, которое совершает угловые и линейные колебания вокруг двух или трех осей, а также для калибровки части параметров системы. Выставка на подвижном основании (код PAM) Программа реализует алгоритмы, предназначенные для определения ориентации платформы относительно направления на Север и местной вертикали при установке на основание, которое перемещается в пространстве, а также для калибровки части параметров системы. Навигация Автономная навигация (код PNAА) Программа реализует алгоритмы, предназначенные для автономного определения координат, скорости и ориентации. Автономная наземная навигация (код PNAL) Программа реализует алгоритмы, предназначенные для определения координат, скорости и ориентации наземного подвижного объекта. Наземная навигация для интегрированной системы (код PNIL) Программа реализует алгоритмы, предназначенные для совместной обработки показаний датчиков инерциальной системы и других источников информации (спутниковой навигационной системы, одометра, нулевой скорости на остановках объекта и т.п.). В результате этого значительно повышается точность определения выходных параметров (координаты, скорость, ориентация) за счет коррекции системы, а также уточнения начальной выставки платформы по курсу и вертикали и калибровки параметров системы. Навигация для интегрированной авиационной системы (код PNIA) Программа реализует алгоритмы, предназначенные для совместной обработки показаний датчиков инерциальной системы и других источников информации (спутниковая навигационная система, доплеровская система измерения скорости, высотомер и т.п.). В результате этого значительно повышается точность определения выходных параметров (координаты, скорость, ориентация) за счет коррекции системы, а также уточнения начальной выставки платформы по курсу и вертикали и калибровки параметров системы. Моделирование Моделирование показаний датчиков системы в процессе калибровки (коды PMC-F, PMC-M и PMC-D) Программы серии PMC предназначены для отладки программ обработки показаний датчиков PCF, PCM и PCD и их алгоритмов, а также для оценки точности калибровки параметров системы методом Монте-Карло. Моделирование показаний датчиков системы в процессе выставки платформы (коды PMA-F, PMA-R и PMA-M) Программы серии PMA предназначены для отладки программ выставки платформы PAF, PAR и PAM и их алгоритмов, а также для оценки точности выставки системы методом Монте-Карло. Моделирование показаний датчиков системы в процессе движения (коды PMN-AL, PMN-AA, PMN-IL и PMN-IA) Программы серии PMN предназначены для отладки программ навигации PNAL, PNAA, PNIL, PNIA и их алгоритмов, а также для оценки точности определения выходных параметров системы методом Монте-Карло. Программы для разработки, исследования и отладки систем Оценка точности определения выходных параметров инерциальной системы по заданной точности гироскопов и акселерометров и заданной траектории движения (код COV) Программа предназначена для определения СКО погрешностей определения выходных параметров инерциальной системы (координаты, скорость ориентация) по заданной точности гироскопов и акселерометров и заданной траектории движения объекта. Программа предназначена для исследования свойств навигационных систем и обоснования принятия решений при их проектировании. Оптимизация параметров конструкции ИИБ на лазерных гироскопах (код INF)
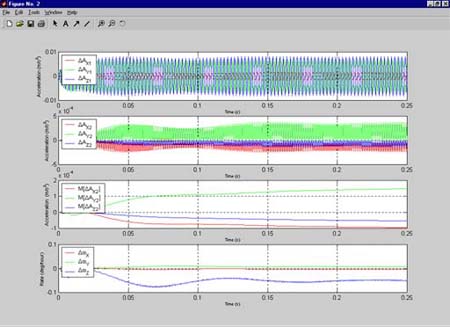
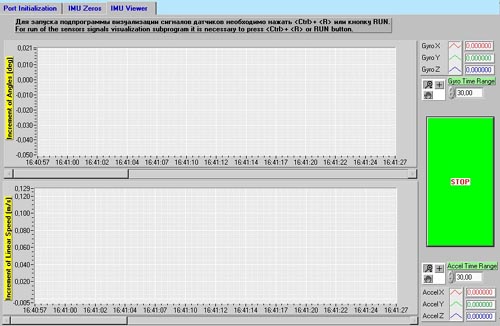
Программа для решения задачи ориентации с расширенной полосой частот пропускания сигналов (код SO) Программа реализует алгоритм, который обеспечивает максимально возможную точность решения задачи ориентации при предельно возможной полосе частот угловых колебаний объекта. Часть программы может быть реализована в простом цифровом автомате, что позволяет существенно уменьшить загрузку центрального вычислителя БИНС. Программа визуализации выходных сигналов датчиков в реальном масштабе времени
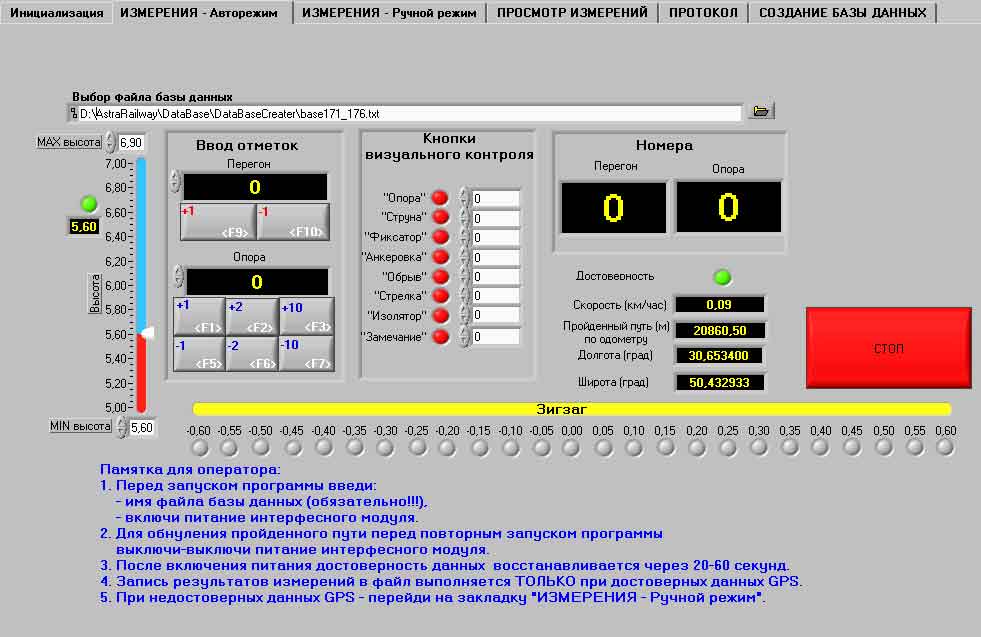
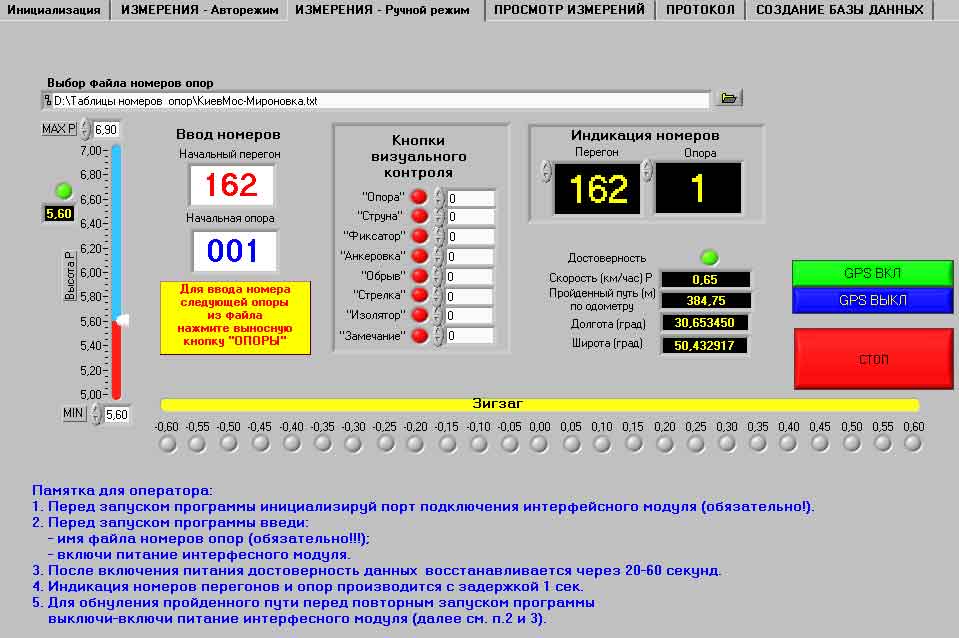
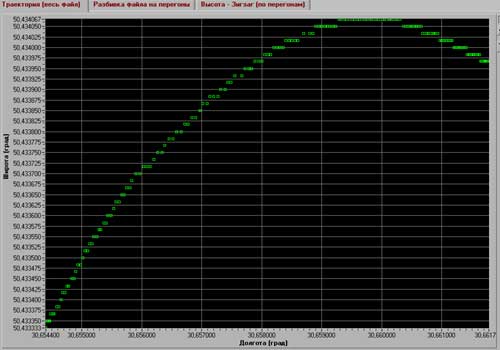
Программное обеспечение для системы контроля состояний контактной сети железной дороги
Технические особенности высокоточной калибровки инерциального измерительного блока БИНС с использованием поворотного стола низкой точности (программы SCLH, SCMH, SCLL, SCLH)
Комплектность поставки программ
|